

Somfy blinds: what's the difference between setvalue and gotovalue?
On blinds and awnings I added more recently, more commands appear, and I'm not sure what "Gotovalue" means.
What I notice with Somfy blinds and awnings is this: if you send repeated commands with the same position, the repeat commands will be sent irrespective of what the Zipabox thinks the current position is. This allows you compensate for communication failures. For 0 and 100, this works just fine.
The problem comes when you specify a value that's neither 0 nor 100. I'm not sure what the Zipabox does, but the effect of repeating the same command several times is chaos, because it keeps moving the blinds with respect to their current position.
Could someone from Zipato clarify this? If you have blinds at position 100, and you send a command to change the position to 50, what does the box do?
 The same question
The same question 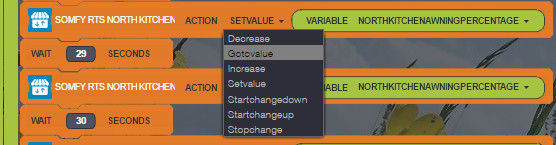{kind=link}
I use qubino shutter controller and I have the same option, always wondered why there are that many different option but never tried them, I tried first with ACTION GO TO VALUE and since it worked never experimented with the other options. Would be nice to have feedback from Zipato.
I use qubino shutter controller and I have the same option, always wondered why there are that many different option but never tried them, I tried first with ACTION GO TO VALUE and since it worked never experimented with the other options. Would be nice to have feedback from Zipato.
How I understand is this - the options setvalue and gotovalue are generaly availabe, not only for blinds but also for dimmers. Some dimmers have functionality, where you can set up the transition time - how long it should take to change the dimming level (usually in miliseconds). Fibaro RGBW (if I remember correctly), also has this king of option between switching colors.
Now - in this term:
I have not tested this though so I only imagine.
How I understand is this - the options setvalue and gotovalue are generaly availabe, not only for blinds but also for dimmers. Some dimmers have functionality, where you can set up the transition time - how long it should take to change the dimming level (usually in miliseconds). Fibaro RGBW (if I remember correctly), also has this king of option between switching colors.
Now - in this term:
I have not tested this though so I only imagine.
That doesn't seem like it would be applicable to blinds, really.
And what about the way the Zipabox handles intermediate positions? I imagine it's forced to check the current position, so it ends up being a relative adjustment: operate the motor for so many seconds starting from position x to get to position y...?
That doesn't seem like it would be applicable to blinds, really.
And what about the way the Zipabox handles intermediate positions? I imagine it's forced to check the current position, so it ends up being a relative adjustment: operate the motor for so many seconds starting from position x to get to position y...?
Replies have been locked on this page!